
Stanford engineers designed a robotic gripper equipped with gecko-inspired adhesives to remove space debris. Researchers extensively tested the adhesive material’s ability to withstand the brutal conditions of outer space in collaboration with NASA’s Jet Propulsion Laboratory (JPL).
Stanford engineers including Mark Cutkosky, professor of mechanical engineering and senior author on the paper, started working with the gecko-inspired adhesives ten years ago with the creation of the original Stickybot, a climbing robot that uses adhesives.
Now, Stanford engineers are putting more focus on applications of the adhesive material in outer space. The robotic gripper is capable of grasping large pieces of debris such as satellites or rocket boosters. The gecko adhesive is one of few materials that can withstand the extreme temperature and zero-gravity conditions according to Cutkosky.
“You can’t use suction cups [and] you can’t use magnets because most of the [debris] is not magnetic, and any kind of sticky tape will not work at the very low temperatures and vacuum of space,” Cutkosky said. “But the gecko adhesives will work, and they’ll work just as well as they do on Earth.”
The adhesive material consists of microscopic wedges of silicon rubb
er that mimic hairs found on gecko palms. Neither gecko hairs nor the adhesive are sticky to the touch and are only activated when force is applied.
The unsticky nature of the material is an advantage to grasping objects in zero gravity, according to lead author on the paper Hao Jiang M.S.’14 Ph.D’17.
“You can very gently put [the adhesive] on the surface, and it sticks,” Jiang said. “This is very important in space where everything is floating. You want to grasp [objects] but not push them away.”

Where a gecko uses its hairs to climb against gravity, the robotic gripper has cables that tighten flaps of the adhesive to provide the necessary force to move in zero-gravity.
The robotic gripper is supplied with motors that tighten and relax the cables, sensors to align the robot with the surface of the debris and extendable arms equipped with adhesive to grasp curved objects.
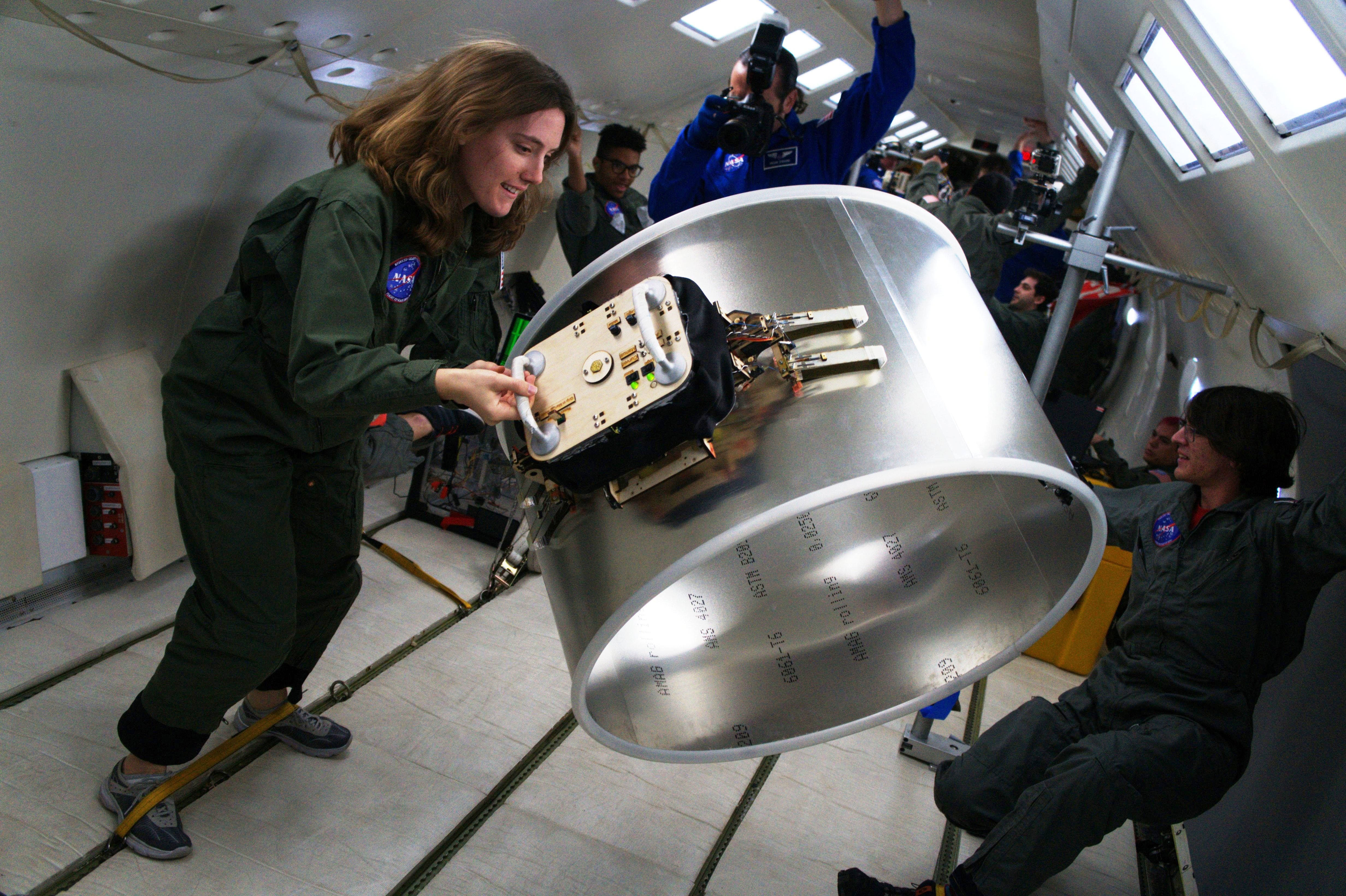
The robotic gripper was tested in JPL’s Robodome as well as in a zero-gravity plane to simulate the vacuum of space. Researchers conducted a total of 80 20-second zero-gravity experiments over the course of two days.
Small versions of the adhesive were sent up to the International Space Station (ISS) for testing, with interest among some engineers for designing small robots equipped with the adhesive, allowing them to climb on the outside of the ISS.
But the gecko adhesive is useful for more than just climbing and debris removal in space. It can also be used on Earth.
“On Earth, all these gripper ideas or prototypes we’ve built––no matter small or large––can be used in industrial applications or tasks such as handling glass panels or generally grabbing things,” Jiang said. “Even on earth, it has advantages over suction cups.”
Contact Renee Hoh at renee.hoh ‘at’ gmail.com